Hemant Kumawat
ML/Robtics Ph.D. candidate at Georgia Tech

I am a robotics researcher with a focus on building intelligent, generalizable autonomous agents that operate in complex physical environments. I explore the intersection of Robotics, Generative Modeling, Computer Vision and Reinforcement learning, with a particular emphasis on learning from limited supervision and unstructured data. My PhD work aims to bridge perception, prediction, and control by developing compositional and causal ML models that enable robust decision-making and planning in real-world scenarios. I have a proven track record of building production-scale ML systems that integrate perception, prediction, and control for autonomous agents. My contributions span behavior prediction, multi-agent forecasting, sensor fusion, and efficient world models, with applications across autonomous systems, real-time control, and adaptive planning. Earlier in my career, I led a 20-member student autonomous vehicle team, deploying complete perception, planning, and control stacks on real hardware. These experiences reflect my com- mitment to bridging rigorous research with real-world impact—closing the loop between simulation, foundation models, and physical robotics.
📌 I am currently seeking full-time opportunities starting October 2025.
📧 Reach me at: hkumawat6[at]gatech.edu
–>
Professional Experience

Joing Qualcomm ADAS/AI team as Research Intern in Summer 2025 to work on multi-object tracking and planning using camera (2D, 3D, and BEV) and radar (RAD cube and point-cloud) signals

PhD candidate at at ECE, Georgia Institute of Technology under Dr. Saibal Mukhopadhyay. Working on learning robust causal representations for efficient robot learning with emphasis on adaptive and generalizable task conditioned spatiotemporal representations for robot learning from partial observations. Published research works in top robotic conferences including CORL, L4DC, AAMAS, IMS and IJCNN. (2021-2025)

Applied Scientist II Intern at Amazon Robotics, Boston office . Mentored by Dr. Andreas Kolling , Jaimie Carlson, and Yulin Zhang. Worked on goal-conditioned multiagent forecasting model to predict slowdowns and deadlocks in Proteus ground robots within a multi-robot warehouse environment. (Summer 2024)
Visiting Researcher at Robotics Institute, Carnegie Mellon University, Pittsburgh. Guided by host Prof. John M Dolan . Developed motion planning and control algorithms that can utilize complex maneuvers such as drifting in order to equip autonomous vehicles to effectively plan and execute evasive maneuvers (May-Aug 2019)

Technical Student Lead at SeDriCa, Self Driving Car Team | UMIC IIT Bombay . Led a team (top 11 teams out of 259) of over 25+ students to build India’s 1st Level 5 autonomy car in a 5-tier challenge (prize money- $1 million) (awarded Mahindra e2o electric vehicle). Developed dynamic object detection and tracking architecture for an autonomous vehicle with sensor information from LiDARs, Radars, Cameras, GPS & IMU using grid-based Bayesian Occupation Filter (2018-2020)
news
| Dec 22, 2024 | 🎉 Paper titled ‘AdaCred: Adaptive Causal Decision Transformers with Feature Crediting_’ accepted in AAMAS 2025. 🎉 |
|---|---|
| Nov 05, 2024 | ✈️ I will be attending CORL 2024 in Munich. If you are around, let’s catch up. ✈️ |
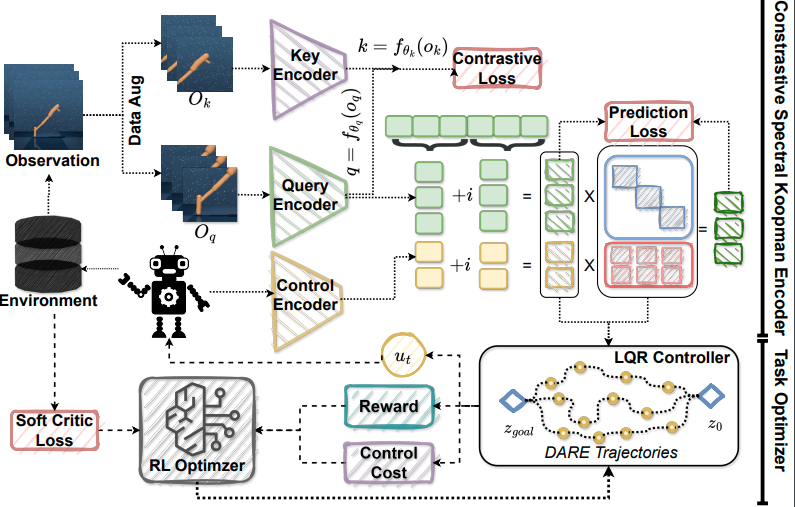
| Sep 05, 2024 | 🎉 Paper titled ‘RoboKoop: Efficient Control Conditioned Representations from Visual Input in Robotics using Koopman Operator’ accepted in CORL 2024. 🎉 |
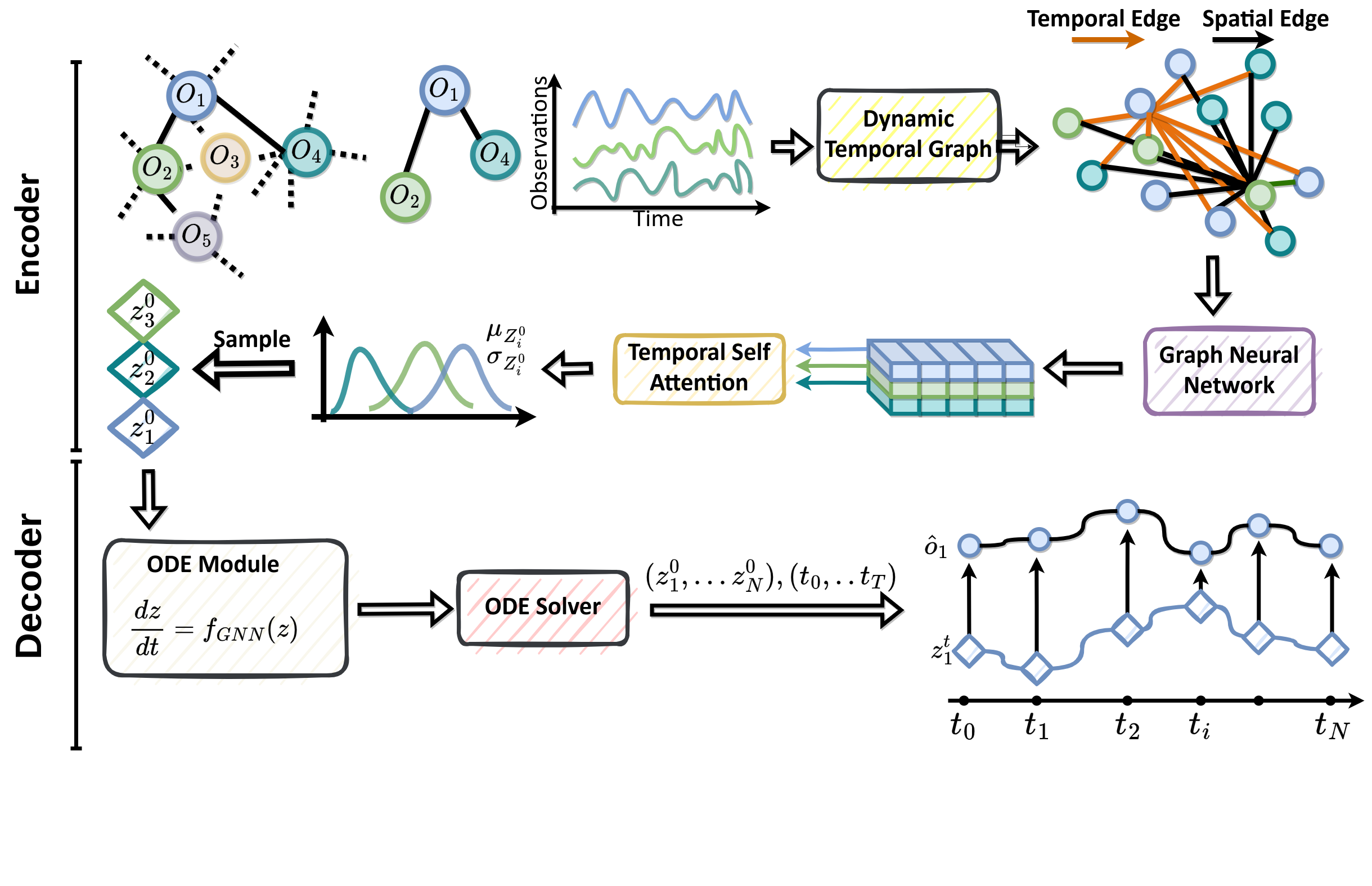
| Jul 01, 2024 | 🎉 Paper titled ‘STEMFold: Stochastic Temporal Manifold for Multi-Agent Interactions in the Presence of Hidden Agents’ accepted in L4DC 2024. 🎉 Attending L4DC 2024 in Oxford, UK. If you are around, let’s catch up! |
| Apr 07, 2024 | I am reviewing for Neurips 2024, ICLR 2025, ICML 2025, AISTATS 2024 and IJCNN 2024. |
latest posts
| Jun 04, 2024 | Kolmogorov-Arnold Networks (KAN) (My Notes) |
|---|---|
| May 16, 2024 | Thoughts on RL challenges |
| Apr 20, 2024 | Common Tools in Reinforcement Learning for Benchmarking |
selected publications
-
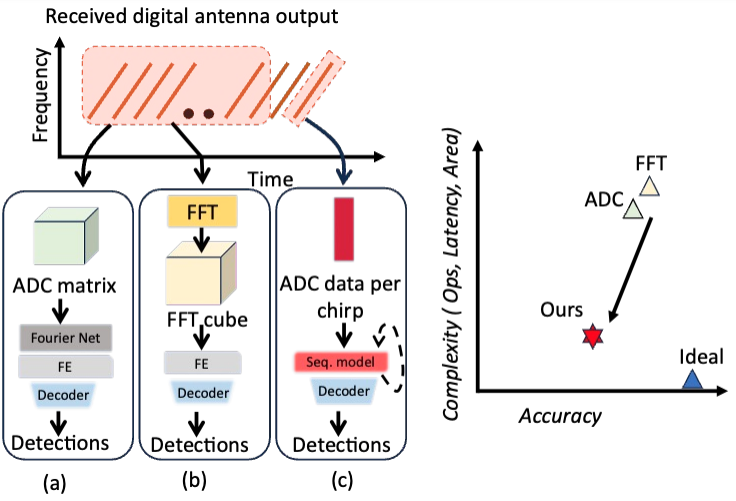
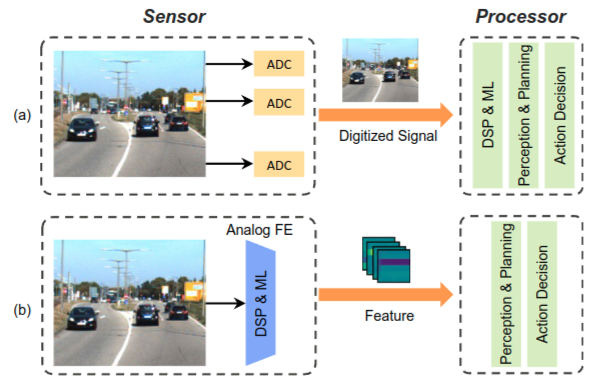
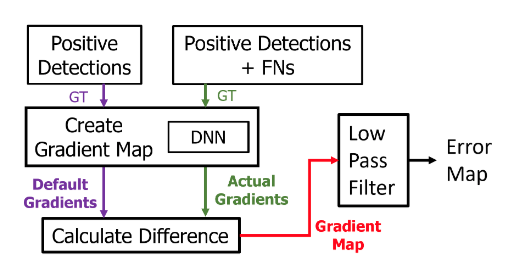
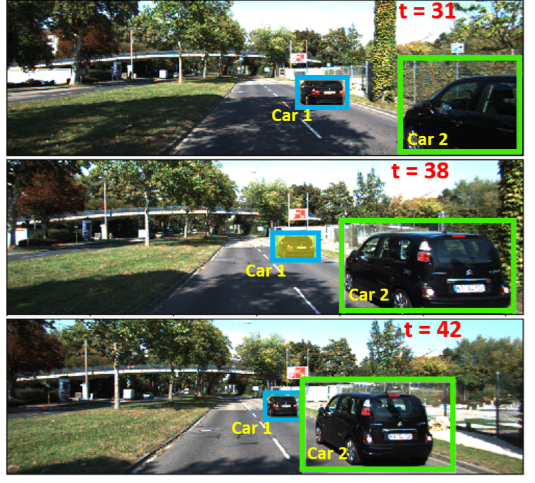
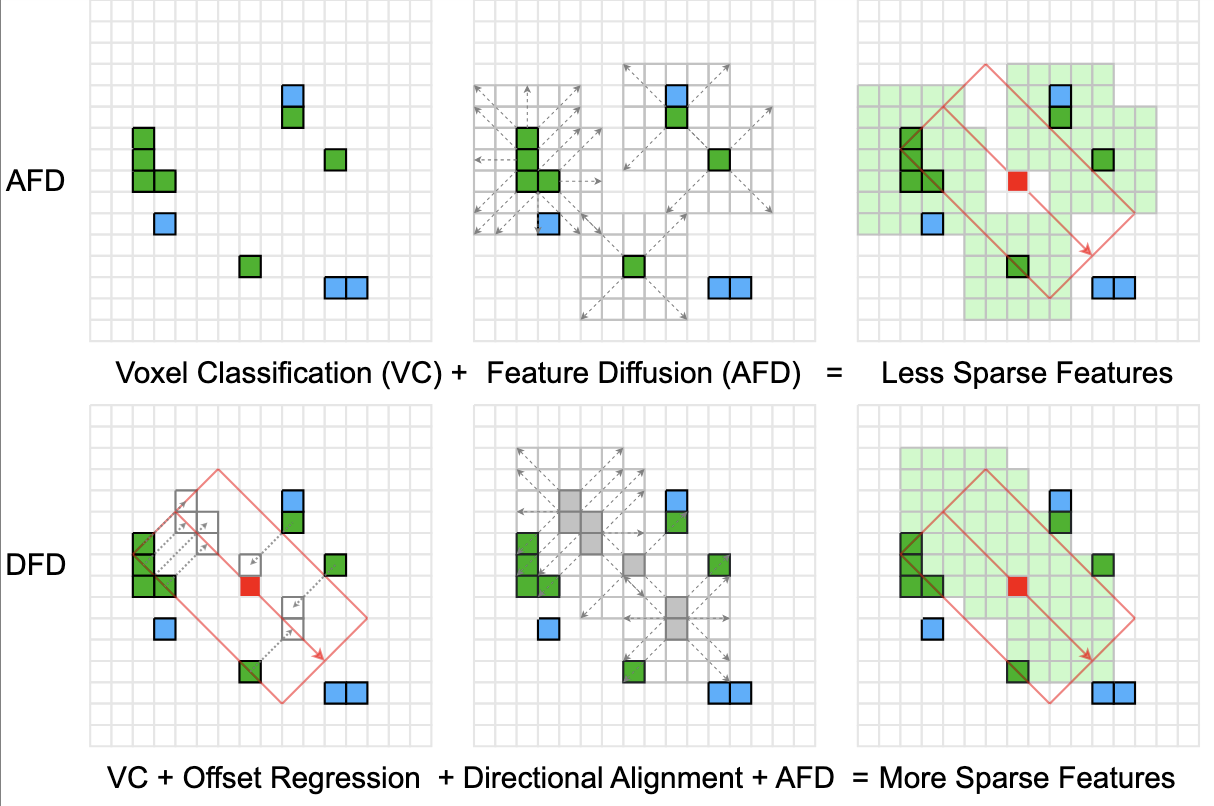 Adaptive Feature Diffusion for Low Compute LiDAR Object DetectionUnder review at CVPR 2025, 2025
Adaptive Feature Diffusion for Low Compute LiDAR Object DetectionUnder review at CVPR 2025, 2025 -
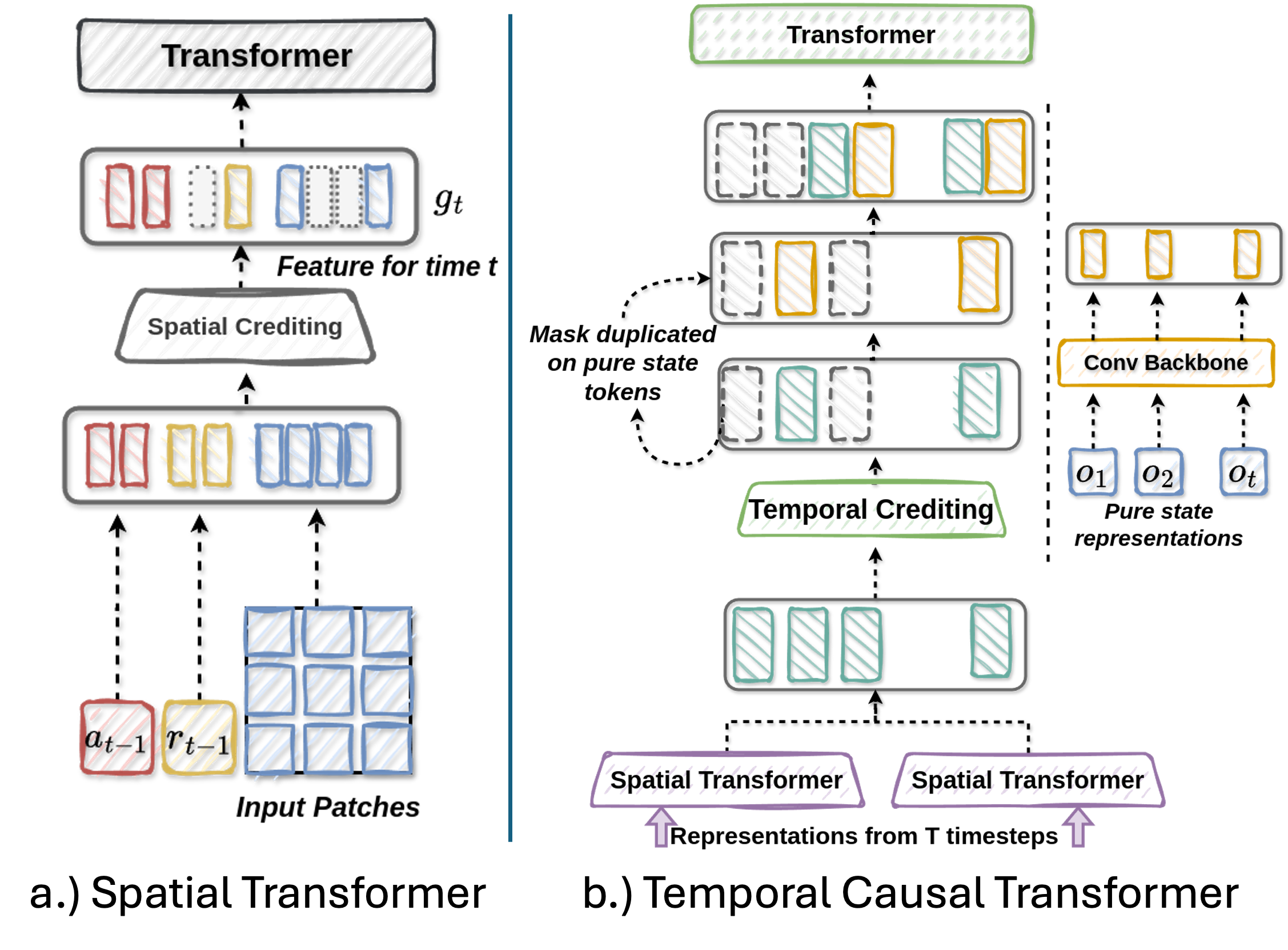 AdaCred: Adaptive Causal Decision Transformers with Feature CreditingProc. of the 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2025), 2025
AdaCred: Adaptive Causal Decision Transformers with Feature CreditingProc. of the 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2025), 2025